 |
Open Lighting Architecture
0.10.4
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Modules Pages
|
Open Lighting Architecture
0.10.4
|
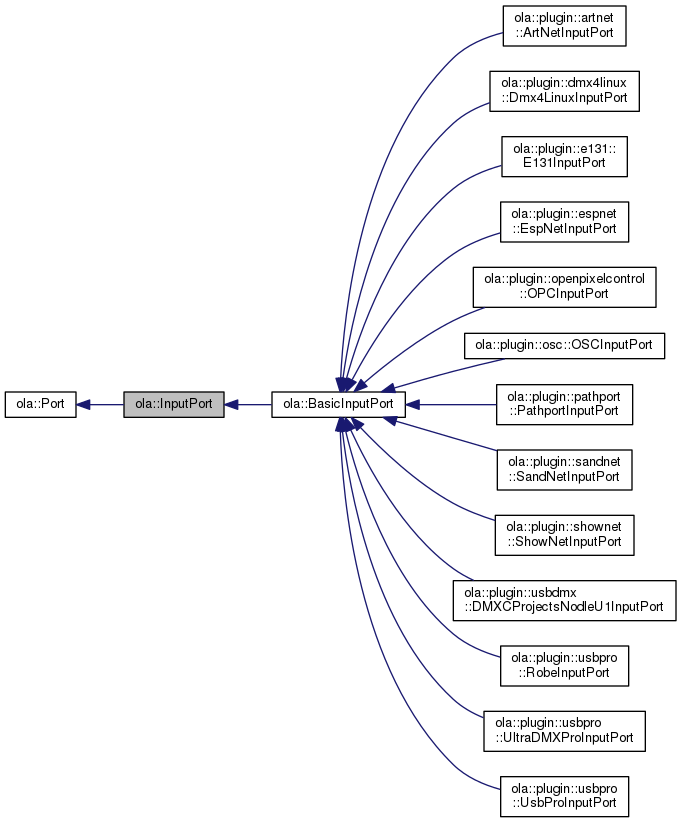
A port that receives DMX512 data.

Public Member Functions | |
| virtual void | DmxChanged ()=0 |
| Signal to the port that the DMX data has changed. | |
| virtual const DmxSource & | SourceData () const =0 |
| Get the current DMX data. | |
| virtual void | HandleRDMRequest (ola::rdm::RDMRequest *request, ola::rdm::RDMCallback *callback)=0 |
| Handle RDMRequests, ownership of the RDMRequest object is transferred. | |
 Public Member Functions inherited from ola::Port Public Member Functions inherited from ola::Port | |
| virtual unsigned int | PortId () const =0 |
| Get the Port ID. This is the index within the device. More... | |
| virtual AbstractDevice * | GetDevice () const =0 |
| Get the device which owns this Port. More... | |
| virtual std::string | Description () const =0 |
| Fetch the string description for a Port. More... | |
| virtual bool | SetUniverse (Universe *universe)=0 |
| Bind this port to a universe. More... | |
| virtual Universe * | GetUniverse () const =0 |
| Fetch the universe this Port is bound to. More... | |
| virtual std::string | UniqueId () const =0 |
| Return the globally unique id for a Port. More... | |
| virtual port_priority_capability | PriorityCapability () const =0 |
| Get the priority capabilities for this port. More... | |
| virtual bool | SetPriority (uint8_t priority)=0 |
| Set the Priority for this Port. More... | |
| virtual uint8_t | GetPriority () const =0 |
| Get the numeric priority for this Port. More... | |
| virtual void | SetPriorityMode (port_priority_mode mode)=0 |
| Set the Priority Mode for this Port. More... | |
| virtual port_priority_mode | GetPriorityMode () const =0 |
| Get the Priority Mode for this Port. More... | |
| virtual bool | SupportsRDM () const =0 |
| Check if this Port supports RDM or not. More... | |
 1.8.8
1.8.8